
《测绘科学技术学报》
历史建筑测绘的工作流程分为前期准备、数据采集、数据处理、成果表达与管理、成果检核与验收、成果提交存档等五个阶段。
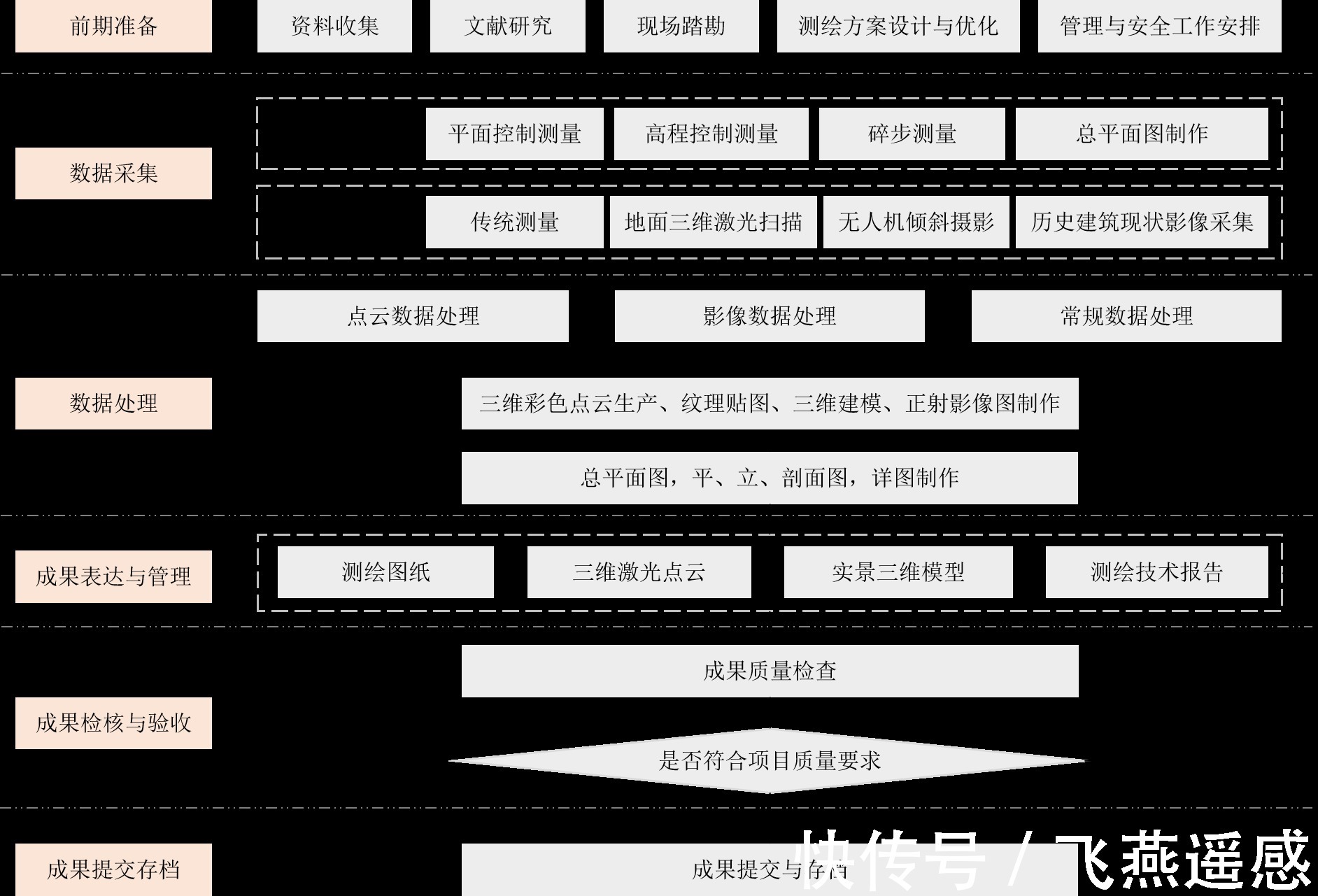
历史建筑测绘工作流程
实施方案
飞燕遥感根据历史建筑测绘的特点和目的,结合历史建筑测绘项目经验,采用空地一体化历史建筑测绘解决方案——综合运用三维激光扫描、倾斜航摄、全景摄影、数码相机拍摄等技术手段进行全面测绘。
地面方面,以三维激光扫描技术为主要测量手段,对建筑单体进行精细化扫描,精确记录建筑室内和立面构件的空间位置、尺寸和纹理。辅以全景摄影技术,对建筑细节利用数码相机拍摄,更全面直观地记录、呈现历史建筑的三维空间信息。
空中方面,以无人机倾斜航摄为主要测量手段,对建筑屋顶及周边环境进行航拍,并基于倾斜摄影技术实现历史建筑三维重建,形成可实时浏览的三维纹理模型。
通过多种测量手段相互配合、互为补充,完整记录历史建筑的现状信息,实现历史建筑三维数字化重建,并绘制总平面现状测绘图、平面图、立面图、剖面图和构件大样图,为历史建筑建立数字档案。
(一)外业数据采集
(1)无人机倾斜摄影数据采集
采用无人机获取建筑屋顶及周边环境的正射影像和倾斜影像,并基于倾斜摄影技术进行三维重建,形成可实时浏览的三维纹理模型。

正射影像? ? ? ? ? ? ? ? ? ? ? ? ??
(2)三维激光扫描数据采集
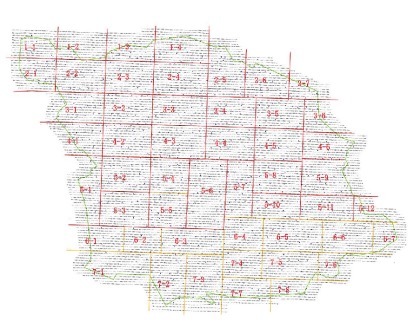
采用三维激光扫描仪获取古建筑单体室内和立面结构的空间数据,在实际测量中,根据成果应用需求,结合现场情况合理布设站点、标靶,选择测量精度和覆盖范围。对测绘人员、站点位置、仪器关键参数等进行现场记录并绘制草图标注站点。
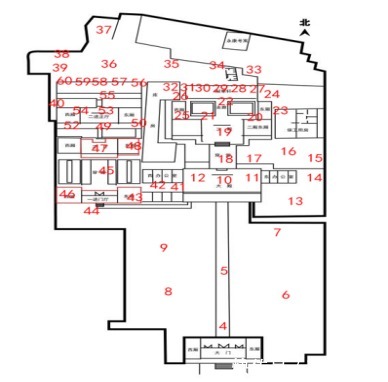

? ?激光点云
(3)建筑内部照片进行采集
利用数码相机拍摄历史建筑外立面,并对建筑屋顶及需要绘制大样图的细节进行照片采集。
(二)内业数据处理
内业数据处理是对采集的倾斜影像、激光点云及拍摄的照片等进行处理。
(1)无人机倾斜摄影建模
基于倾斜影像的实景三维模型制作包括数据预处理、像控点刺点、空三加密、三维模型生成、模型修饰等。
空三加密
 分块空三 ??
分块空三 ??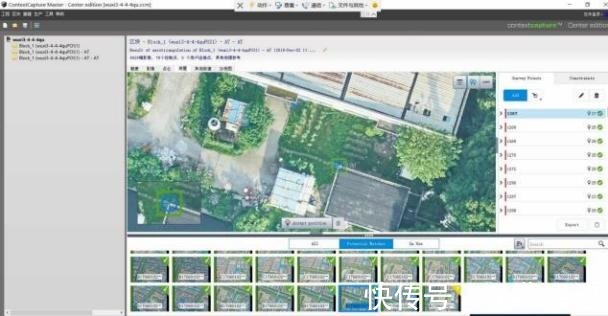 合并空三
合并空三
影像调色
模型修饰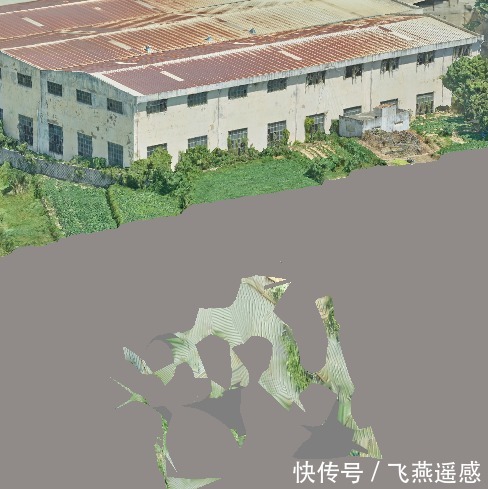

漂浮物修饰前后效果对比
三维模型生成

实景三维模型成果
(2)点云数据预处理
点云数据预处理主要包括点云拼接、去噪和着色,最终导出真彩色点云数据。
点云拼接:将外业扫描获取的不同测站的点云数据进行拼接,直至不同测站点云无缝拼接完成后,即可得到建筑物完整的点云数据。
点云去噪:对扫描时的人员、车辆,干扰物、冗余数据等无效点云数据删除,保留有效点云。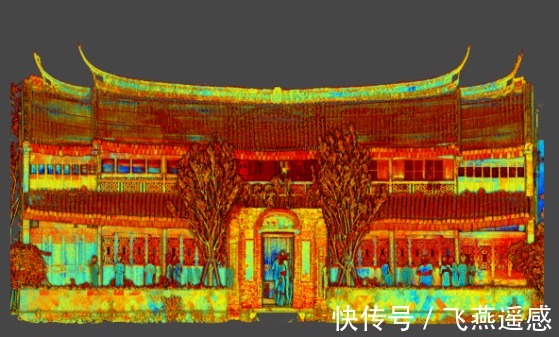
历史建筑全景照? ? ? ? ? ? ? ? ??
(3)历史建筑测绘图绘制
根据要求,绘制历史建筑测绘图,包括总平面现状图、平面图、立面图、剖面图和典型构件大样图。
基于历史建筑正射影像图,绘制总平面现状图;基于点云三维模型,利用点云切片绘制历史建筑的平、立、剖面图;结合数码相机拍摄的历史建筑细节照片,绘制大样图。
总平面图:绘制建筑轮廓、周边建筑或构筑物、道路、广场、水域、山体、绿化等环境信息,且完整覆盖历史环境要素;标注建筑总尺寸,建筑与相邻建筑物、构筑物的距离;场地标高与建筑、构筑物的标高,平屋面建筑标注天面、女儿墙的标高,坡屋面建筑宜标注屋脊、檐口下沿的标高;标注建筑名称、出入口位置、层数、建筑高度、周边建筑的层高、周边道路、广场名称等信息。
上一篇:古人竟然这么厉害!盘点中国测绘史上的八大牛
下一篇:没有了